








Лекция Механизм и его элементы
Код роботи: 1203
Вид роботи: Лекція
Предмет: Механіка
Тема: Механизм и его элементы
Кількість сторінок: 11
Дата виконання: 2016
Мова написання: російська
Ціна: безкоштовно
1. Классификация кинематических пар
2. Классификация кинематических цепей
В учебной литературе используются несколько определений механизма:
1) Механизмом называется система твердых тел, предназначенная для передачи и преобразования заданного движения одного или нескольких тел в требуемые движения других твердых тел.
2) Механизм - кинематическая цепь, в состав которой входит неподвижное звено (стойка) и число степеней свободы которой равно числу обобщенных координат, характеризующих положение цепи относительно стойки.
Деталь – это изделие, изготовленное без сборочных операций.
Звено – одна или несколько неподвижно соединенных друг с другом деталей, входящих в механизм и движущихся, как одно целое.
Здесь цепь - система звеньев.
Стойка - звено, которое при исследовании механизма принимается за неподвижное.
В механике, степени свободы — это совокупность независимых координат перемещения и/или вращения, полностью определяющая положение системы или тела (а вместе с их производными по времени — соответствующими скоростями - полностью определяющая состояние механической системы или тела - то есть их положение и движение). Это фундаментальное понятие применяется в теоретической механике, теории механизмов и машин, машиностроении, авиации и теории летательных аппаратов, робототехнике и других областях.
В отличие от обычных декартовых или какого-то другого типа координат, такие координаты в общем случае называются обобщёнными координатами (декартовы, полярные или какие-то другие конкретные координаты являются, таким образом, частным случаем обобщённых). По сути речь идет о минимальном наборе чисел, который полностью определяет текущее положение (конфигурацию) данной системы.
Обобщенная координата механизма – каждая из независимых координат, определяющих положение всех звеньев механизма относительно стойки.
Таким образом, число степеней свободы или подвижность механизма - число независимых обобщенных координат однозначно определяющее положение всех его звеньев на плоскости или в пространстве.
3) Механизмом называется устройство для передачи и преобразования движений и энергий любого рода.
4) Механизм - система твердых тел, подвижно связанных путем соприкосновения и движущихся определенным, требуемым образом относительно одного из них, принятого за неподвижное.
Недостатками этих определений являются: первое не отражает способности механизма преобразовывать не только движение, но и силы; второе не содержит указания выполняемой механизмом функции. Учитывая сказанное, дадим следующую формулировку понятия механизм:
Механизмом называется система, состоящая из звеньев и кинематических пар, образующих замкнутые или разомкнутые цепи, которая предназначена для передачи и преобразования перемещений входных звеньев и приложенных к ним сил в требуемые перемещения и силы на выходных звеньях.
Кинематическая пара (КП) - подвижное соединение двух звеньев, допускающее их определенное относительное движение.
1. Классификация кинематических пар
Кинематические пары (КП) классифицируются по следующим признакам:
1) по виду места контакта (места связи) поверхностей звеньев:
- низшие, в которых контакт звеньев осуществляется по плоскости или поверхности (пары скольжения);
- высшие, в которых контакт звеньев осуществляется по линиям или точкам (пары, допускающие скольжение с перекатыванием). Они имеются, например, в зубчатых и кулачковых механизмах).
2) по относительному движению звеньев, образующих пару:
- вращательные;

- поступательные;
- цилиндрические;
- сферические;
- винтовые;
- плоские.
Все пары делятся на пять классов, в зависимости от числа налагаемых связей на подвижность каждого из звеньев. Например, если телами (звеньями), образовавшими кинематическую пару, утрачено по 5 степеней свободы каждым, эту пару называют кинематической парой 5-го класса. Если утрачено 4 степени свободы – 4-го класса и т.д. Число степеней подвижности обозначается за H. Число налагаемых связей обозначается за S. При этом число степеней подвижности можно определить по формуле: H=6-S.
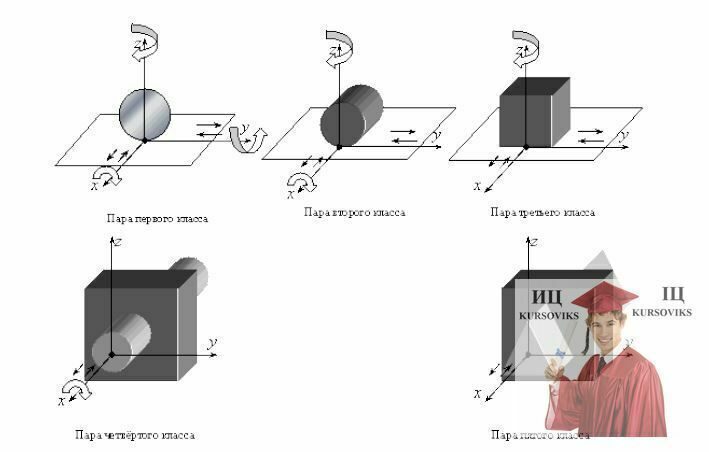
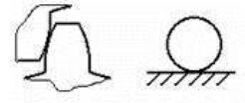
Рис. 1 – Кинематические пары различных классов

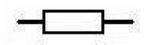
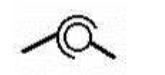
Рис. 2 – Примеры кинематических пар
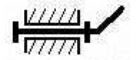
Рассмотрим кинематическую пару «винт-гайка» (рис.3). Число степеней подвижности этой пары H равно 1, а число налагаемых связей S равно 5. Это пара будет являться парой пятого класса, свободным можно выбрать только один вид движения для винта или гайки, а второе движение будет сопутствующим.

Рис. 3 – Кинематическая пара «винт-гайка» как пара пятого класса
Основным признаком механизма является преобразование механического движения. Механизм входит в состав многих машин, т.к. для преобразования энергии, материалов и информации требуется обычно преобразование движения получаемого от двигателя. Нельзя отождествлять понятия "машина" и "механизм". Во-первых, кроме механизмов в машине всегда имеются дополнительные устройства, связанные с управлением механизмами. Во-вторых, есть машины, в которых нет механизмов. Например, в последние годы созданы технологические машины, в которых каждый исполнительный орган приводится в движение от индивидуального электро- или гидродвигателя.
При описании механизмов, они были разделены на отдельные группы по признаку их конструктивного оформления (рычажные, кулачковые, фрикционные, зубчатые и др.)
Фрикционный механизм - механизм, в к-ром передача или изменение движения обусловлены силами трения между его элементами: фрикционная передача, фрикционная муфта, колодочный, ленточный или дисковый тормоза, клиновой зажим и т.д.
Механизмы образуются последовательным присоединениям звеньев к начальному механизму.
Выполнение звеньев из нескольких деталей обеспечивается их соединением. Различают соединения неразъемные (сварные, заклепочные, клеевые) и разъемные (шпоночные, шлицевые, резьбовые).
Шпоночное соединение - соединение охватывающей и охватываемой детали для передачи крутящего момента с помощью шпонки. Шпоночное соединение позволяет обеспечить подвижное соединение вдоль продольной оси. Классификация соединений в зависимости от формы шпонки: соединения призматическими шпонками, соединения клиновыми шпонками, соединения тангенциальными шпонками, соединения сегментными шпонками, соединения цилиндрическими шпонками.
Основной критерий работоспособности шпоночного соединения — прочность на смятие.
Достоинства шпоночных соединений:
- простота конструкции;
- легкость монтажа и демонтажа;
- низкая стоимость.
Недостатки шпоночных соединений:
- шпоночные пазы ослабляют прочность вала и ступицы;
- концентрация напряжений, возникающих в зоне шпоночного паза, снижает сопротивление усталости.
Шлицевое (зубчатое) соединение - соединение вала (охватываемой поверхности) и отверстия (охватывающей поверхности) с помощью шлицев (пазов) и зубьев (выступов), радиально расположенных на поверхности. Обладает большой прочностью, обеспечивает соосность вала и отверстия, с возможностью осевого перемещения детали вдоль оси.

Рис. 4 – Шпоночное (а) и шлицевое (б) соединения
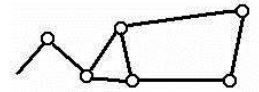
Звенья в зависимости от вида их материала могут быть твердые и гибкие (упругие), например, ремень. Жидкости и газы в гидро- и пневмомеханизмах звеньями не считаются. Условное изображение звеньев на кинематических схемах механизмов регламентируется ГОСТом. Примеры изображения некоторых звеньев приведены на рис.2. На кинематических схемах звенья обозначаются арабскими цифрами:0, 1, 2 и т.д. (см. рис. 5).

Рис. 5 - Примеры изображения звеньев на кинематических схемах механизмов
Кинематическая цепь - система звеньев, образующих между собой кинематические пары.
2. Классификация кинематических цепей
Итак, несколько звеньев, соединённых между собой кинематическими парами, образуют кинематическую цепь.
Кинематические цепи бывают:
- замкнутые (простые). В замкнутой цепи каждое звено входит не менее, чем две кинематические пары.
- разомкнутые (простые).
- сложные.
По признаку наличия разветвлений различают цепи простые (каждое звено цепи входит не более, чем две кинематических пары) и сложные или разветвленные (некоторые звенья входят в три, или более пары); в разветвленных цепях могут присутствовать так называемые кратные (двойные, тройные и т.д.) шарниры.
По области движения звеньев цепи бывают плоские (траектории движения точек всех звеньев - плоские кривые, лежащие в одной или параллельных плоскостях) и пространственные (звенья двигаются в различных плоскостях).
Чтобы из кинематической цепи получить механизм, необходимо:
1) одно звено сделать неподвижным, т.е. образовать станину (стойку);
2) одному или нескольким звеньям задать закон движения (сделать ведущими) таким образом, чтобы все остальные звенья совершали требуемые целесообразные движения.
Таким образом, каждый механизм имеет стойку и подвижные звенья, среди которых выделяют входные, выходные и промежуточные звенья.
Входное звено – звено, которому сообщается движение, преобразуемое механизмом в требуемые движения других звеньев.
Входное звено соединено с двигателем либо с выходным звеном другого механизма. Обычно в механизме имеется одно входное и выходное звено. Но в некоторых случаях имеют место механизмы с несколькими входными или выходными звеньями, например, дифференциал автомобиля.
Дифференциал - это механическое устройство, которое делит момент входного вала между выходными валами. Наиболее широко применяется в конструкции привода автомобилей, где момент от входного вала коробки передач (или карданного вала) поровну делится между полуосями правого и левого колеса. В полноприводных автомобилях также может применяться для деления момента в заданном соотношении между ведущими осями.
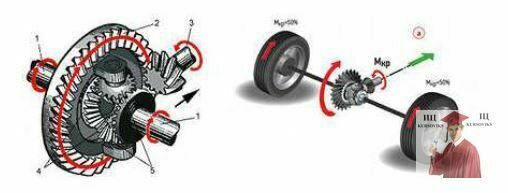
Рис. 6 - Дифференциал
Отличительным признаком входного звена является то, что элементарная работа приложенных к ним сил положительна (работа силы считается положительной, если направление действия силы совпадает с направлением движения точки её приложения или под острым углом к ней).
Выходное звено – звено, совершающее движение, для выполнения которого предназначен механизм. Выходное звено соединено с исполнительным устройством (рабочим органом, указателем прибора), либо с входным звеном другого механизма. Элементарная работа приложенных к выходному звену сил является отрицательной (работа силы считается отрицательной, если направление действия силы противоположно направлению движения точки её приложения).
Начальное звено - звено, координата которого принята за обобщенную.
Начальная кинематическая пара - пара, относительное положение звеньев в которой принято за обобщенную координату.
Звенья соединяются друг с другом подвижно посредством кинематических пар: вращательных (шарнир) и поступательных (ползун).
Траектория движения точки (звена) – линия перемещения точки в плоскости.
Это может быть прямая линия или кривая.