








Контрольная работа №1 с курса Теория автоматического управления - 3 задачи
Код роботи: 2009
Вид роботи: Контрольна робота
Предмет: Теорія автоматичного управління (Теория автоматического управления)
Тема: №1, 3 задачи
Кількість сторінок: 19
Дата виконання: 2017
Мова написання: російська
Ціна: 150 грн (або 75 грн за задачу)
Задача 1
Задание:
Определить весовую функцию g(t) и переходную функцию h(t) линейной САУ, состоящей из последовательного соединения апериодического и идеального интегрирующего звеньев, по заданным параметрам ее передаточной функции:
Составить таблицу расчетных значений искомых временных характеристик и построить их графики для временного интервала: t=0–5T с шагом дискретизации, равным 0,5Т. Масштаб по оси ординат студентом выбирается самостоятельно, исходя из того, что высота графика должна быть не менее 8–10см.
Задача 2
Задание:
Определить круговую частоту ω, с которой устройство САУ, состоящее из последовательно включенных двух апериодических и одного идеального интегрирующего звеньев, дает заданный сдвиг по фазе между выходным и входным сигналами. При этом следует определить амплитуду выходного сигнала Ym на данной частоте, если известна амплитуда входного сигнала Xm. Передаточная функция заданной САУ имеет следующий вид:
Задача 3
Задание:
1. Построить асимптотическую логарифмическую амплитудно-частотную характеристику (ЛАЧХ) и логарифмическую фазочастотную характеристику (ЛФЧХ) для линейной системы САУ, состоящей из четырех последовательно включенных звеньев.
Одного реального дифференцирующего звена с передаточной функцией:

Двух апериодических звеньев первого порядка с передаточными функциями:
Одного идеального интегрирующего звена с передаточной функцией:
По условиям задачи передаточная функция заданной линейной САУ имеет следующий вид:
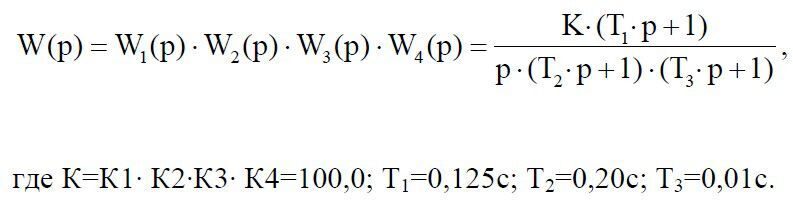
2. Построить годограф АФЧХ W(jω) заданной САУ.
1. Справочник по теории автоматического управления / под ред. А. А. Красовского. – М.: Наука. Главная редакция физико-математической литературы, 1987. – 712 с.
2. Выгодский, М. Я. Справочник по элементарной математике / М. Я. Выгодский. – М.: Наука. Главная редакция физико-математической литературы, 1976. – 335 с.
3. Бронштейн, И. Н. Справочник по математике для инженеров и учащихся втузов / И. Н. Бронштейн, К. А. Семендяев. – М.: Наука. Главная редакция физико-математической литературы, 1981.
4. Дьяконов В. П. MATLAB. Анализ, идентификация и моделирование систем. Специальный справочник / В. П. Дьяконов, Круглов В. В. – СПб.: Питер. 2001. – 448 с.
5. Дьяконов В. П. Simulink 4. Специальный справочник / В. П. Дьяконов. – СПб.: Питер. 2002. – 528 с.
6. Дьяконов В. П. Математические пакеты расширения MATLAB. Специальный справочник / В. П. Дьяконов, Круглов В. В. – СПб.: Питер. 2001. 480 с.
7. Зельдин, Е. А. Децибелы / Е. А. Зельдин. 2-е изд., доп. – М.: Энергия. 1977. – 64 с. (Массовая радиобиблиотека; вып. 949).