








Лекция Понятие о структурном анализе
Код роботи: 1204
Вид роботи: Лекція
Предмет: Механіка
Тема: Понятие о структурном анализе
Кількість сторінок: 11
Дата виконання: 2016
Мова написання: російська
Ціна: безкоштовно
1. Основные понятия структурного анализа
2. Цели и задачи кинематического анализа
3. Основные виды механизмов
Вопросы для самопроверки
Cтруктура любой технической системы определяется функционально связанной совокупностью элементов и отношений между ними. При этом для механизмов под элементами понимаются звенья, группы звеньев или типовые механизмы, а под отношениями подвижные (КП) или неподвижные соединения. Поэтому под структурой механизма понимается совокупность его элементов и отношений между ними, т.е. совокупность звеньев, групп или типовых механизмов и подвижных или неподвижных соединений.
Геометрическая структура механизма полностью описывается заданием геометрической формы его элементов, их расположения, указания вида связей между ними. Структура механизма может быть на разных стадиях проектирования описываться различными средствами, с разным уровнем абстрагирования: на функциональном уровне - функциональная схема, на уровне звеньев и структурных групп - структурная схема и т.п.
Структурная схема - графическое изображение механизма, выполненное с использованием условных обозначений рекомендованных ГОСТ (см. например ГОСТ 2.703- или принятых в специальной литературе, содержащее информацию о числе и расположении элементов (звеньев, групп), а также о виде и классе кинематических пар, соединяющих эти элементы.

Рис. 1 – Структурные схемы простейших механизмов
(а – кривошипно-ползунный, б – четырехшарнирный, в – четырехзвенный кулисный, г – синусный, д – тангенсный, е- шестизвенный кулисный)
В отличие от кинематической схемы механизма, структурная схема не содержит информации о размерах звеньев и вычерчивается без соблюдения масштабов.
Кинематическая схема - графическая модель механизма, предназначенная для исследования его кинематики.
Как на любом этапе проектирования при структурном синтезе различают задачи синтеза и задачи анализа.
Задачей структурного анализа является задача определения параметров структуры заданного механизма - числа звеньев и структурных групп, числа и вида КП, числа подвижностей (основных и местных), числа контуров и числа избыточных связей.
1. Основные понятия структурного анализа
Подвижность механизма – число независимых обобщенных координат, однозначно определяющее положение звеньев механизма на плоскости или в пространстве.
Связь - ограничение, наложенное на перемещение тела по данной координате.
В некоторых случаях при проектировании механизмов для повышения жёсткости конструкции, улучшения условий передачи сил вводятся так называемые избыточные (пассивные) связи (дополнительные звенья), (рис. 5).
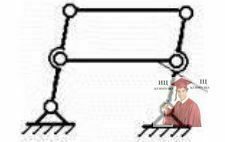
Рис. 2 - Механизм с избыточной связью
Избыточные (пассивные) - такие связи в механизме, которые повторяют или дублируют связи, уже имеющиеся по данной координате, и поэтому не изменяющие реальной подвижности механизма (при этом расчетная подвижность механизма уменьшается, а степень его статической неопределимости увеличивается).
Лишние степени свободы используются для упрощения кинематической схемы механизма, сокращения потерь при передаче мощности, повышения механического коэффициента полезного действия механизма. Например, между кулачком 1 и толкателем 2 кулачкового механизма устанавливается ролик 3 для устранения трения (рис. 3).
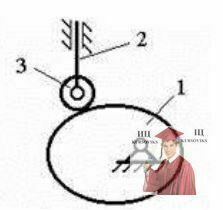
Рис. 3 - Кулачковый механизм с роликовым толкателем
Местные подвижности - подвижности механизма, которые не оказывают влияния на его функцию положения (и передаточные функции), а введены в механизм с другими целями (например, подвижность ролика в кулачковом механизме обеспечивает замену в высшей паре трения скольжения трением качения).

2. Цели и задачи кинематического анализа
Кинематический анализ механизма – исследование его основных параметров с целью изучения законов изменения и на основе этого выбор из ряда известных наилучшего механизма.
Кинематический анализ механизма выполняется либо для заданного момента времени, либо для заданного положения входного звена; иногда для анализируемого положения механизма задают взаимное расположение каких-либо его звеньев.
Цели:
1. Определение кинематических характеристик звеньев: перемещение; скорость; ускорение; траектория движения; функция положения при известных законах движения входных (ведущих) звеньев.
2. Оценка кинематических условий работы рабочего (выходного) звена.
3. Определение необходимых численных данных для проведения силового, динамического, энергетического и других расчётов механизма.
Исходные данные:
1. Кинематическая схема механизма.
2. Размеры и иные геометрические параметры звеньев (но только такие, которые не изменяются при движении механизма).
3. Законы движения входных звеньев (или параметры движения, например, угловая скорость и угловое ускорение входного звена в выбранном для анализа положении механизма).
Кинематическая схема механизма – структурная схема механизма с указанием размеров звеньев, необходимых для кинематического анализа механизма.
Задачи:
- о положениях звеньев механизма. Определение траекторий движения точек;
- о скоростях звеньев или отдельных точек механизма;
- об ускорениях звеньев или отдельных точек механизма.
Методы:
- графический (или метод графиков и диаграмм);
- графоаналитический (или метод планов скоростей и ускорений);
- аналитический;
- экспериментальный.
3. Основные виды механизмов
Исходя из кинематических, конструктивных и функциональных свойств, механизмы подразделяют на рычажные, кулачковые, фрикционные, зубчатые и др.
Рычажными называют механизмы с геометрическим замыканием (запиранием) звеньев во вращательных и поступательных кинематических парах.
Благодаря этому они могут передавать большие усилия и мощности, чем другие механизмы в аналогичных условиях. Звенья механизмов сравнительно просты в изготовлении.
Механизмы применяют в основном для преобразования вращательного движения входного звена в качательное или возвратно-поступательное движение выходного звена.
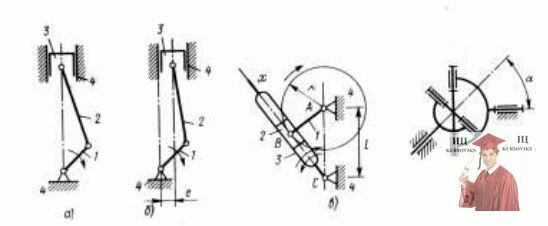
Рис. 4 - Рычажные механизмы
а - центральный (аксиальный) кривошипно- ползунный; б - дезаксиальный кривошипно-ползунный; в - кривошипно-кулисный; г - пространственный сферический
Рычажные механизмы делятся на плоские и пространственные. На рис. 4 показаны схемы аксиального (рис. 4, а) и дезаксиального (рис. 4, б) кривошипно-ползунного механизма, используемого для преобразования вращательного движения кривошипа 1 в возвратно-поступательное движение ползуна 3. Ползун и кривошип соединяются с помощью звена 2, совершающего сложное плоское движение и соединенного с другими подвижными звеньями с помощью низших кинематических пар вращения. Дезаксиал (смещение) е вводится в основном для уменьшения давления ползуна на неподвижное звено 4.
На рис. 4, в изображен кривошипно-кулисный механизм. Он состоит из кривошипа 1, кулисы 3, представляющей собой подвижное направляющее звено, и звена 2, называемого кулисным камнем. Если l>r, то вращательное движение кривошипа 1 преобразуется в возвратно-вращательное движение кулисы 3. Когда l<r , то при равномерном вращении кривошипа 1 кулиса 3 вращается с переменной угловой скоростью.
На рис. 4, г представлен пространственный сферический механизм с низшими кинематическими парами, который служит для передачи движения между пересекающимися осями под углом α. Этот механизм известен под названием карданной передачи.
Кулачковые механизмы образуются путем силового и геометрического замыкания звеньев: кулачка и толкателя (коромысла).
Кулачок обычно представляет собой диск (реже цилиндр), профиль которого очерчен определенной кривой, которая строго задает движение толкателю (коромыслу). В зависимости от вида движения сопряженное с кулачком звено называется либо толкателем (рис. 5, а, б), либо коромыслом (рис. 5, в, г).
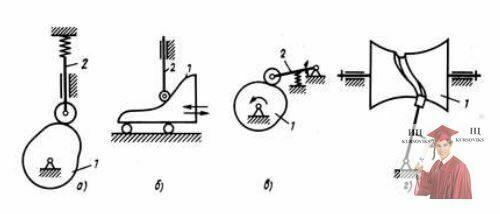
Рис. 5 - Кулачковые механизмы
а - вращающийся кулачок и возвратно- поступательно движущийся толкатель; б - возвратно-поступательно движущиеся кулачок и толкатель; в - вращающийся кулачок и качающийся толкатель; г - пространственный кулачковый механизм
Кулачок и коромысло соединяют со стойками с помощью вращательных пар, толкатель - поступательной парой. Для уменьшения потерь на трение толкатель и коромысло снабжают цилиндрическими роликами.
Конструктивно силовое замыкание звеньев осуществляют за счет сил упругости (например, от предварительно деформированной пружины), реже - сил тяжести.
Механизмы используют для преобразования вращательного (рис. 5, а, в) или возвратно-поступательного движения (рис. 5, б) входного звена (ведущего звена) 1 в возвратно-поступательное (рис. 5, а, б) или возвратно-вращательное (рис. 5, в) движение выходного (ведомого) звена 2 даже с остановками заданной продолжительности.
В механизмах применяют также сложные плоские и пространственные механизмы в комбинациях с рычажными и зубчатыми механизмами.
Фрикционные механизмы. передают движение от ведущего звена к ведомому за счет сил трения, возникающих в результате контакта этих звеньев.
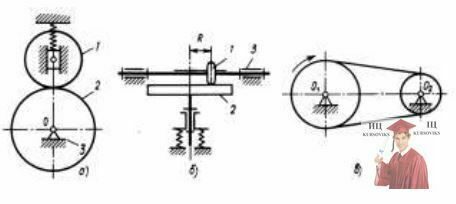
Рис. 6 - Фрикционные механизмы
а - фрикционная передача; б - лобовой вариатор; в - механизм с гибким звеном
Простейшая фрикционная передача (механизм) показана на рис. 6, а. Она состоит из двух цилиндрических катков 1, 2 и стойки 3. Один каток прижимается другому силой упругости пружины. К фрикционным механизмам относятся и вариаторы (рис. 6, б), которые обеспечивают плавное изменение угловой скорости ведомого звена 2 при равномерном вращении ведущего звена 1 и его перемещении вдоль оси. Вариаторы называются бесступенчатыми передачами.
Фрикционный механизм может быть выполнен и с гибкими звеньями. Его применяют для передачи вращения между валами при больших межосевых расстояниях.
Под гибкими звеньями понимают ремни, канаты, цепи, нити. На рис. 6, в приведена простейшая передача гибкой связью.
Зубчатые механизмы (передачи) образуются с помощью зубчатых колес 1 и 2 - цилиндрических или конических дисков, снабженных выступами - зубьями (рис. 7, а).
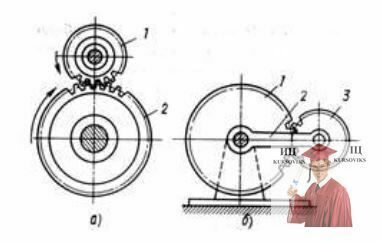
Рис. 7 - Зубчатые механизмы
а - обычный; б - планетарный
Передача нагрузки и движения между колесами осуществляется за счет воздействия зубьев друг на друга (силового замыкания - зацепления зубьев). В отличие от фрикционной передачи здесь исключено проскальзывание звеньев.
Механизмы широко применяют в машинах для передачи вращения между неподвижными и подвижными осями. В последнем случае механизмы называют планетарными. На рис. 7, б показан простейший планетарный механизм. Ось колеса 3 - сателлита, соединенная водилом 2 с осью колеса 1, совершает вращательное движение. Колесо 1 в этом случае называется центральным, а колесо 3 – сателлитом.
Вопросы для самопроверки
1) Какие механизмы можно использовать для преобразования вращательного движения в поступательное и наоборот?
2) Какие механизмы обеспечивают неравномерное движение выходного звена при равномерном вращении входного?
3) Какие механизмы можно использовать при необходимости остановки заданной продолжительности выходного звена?
4) Какие механизмы можно использовать для плавного изменения скорости выходного звена по наперед не заданному закону при равномерном вращении входного?